群时延相时延
本文最后更新于:2024年3月7日 晚上
引子:咋又是你,群时延?
今天在看通信原理时,又碰到了群时延这个老朋友,之前在看信号与系统与射频集成电路基础时就没怎么弄明白,今儿个又让我给遇上了,俗话说再一再二不再三,今天必须把它给解决掉。查了很多资料,又翻出了之前信号与系统,写得那叫一个obscure,又费了很大功夫查资料,终于弄明白了。
辨析:好像有个弟弟叫相时延?
首先要明确的概念是,时延代表的含义是什么——时间上的延迟。那么时间与相位又该如何联系上?我们很自然地联想到时间与相位之间的关系:
\[
\theta = \omega·t
\] 式中\(\theta\)代表相位,单位rad;\(\omega\)代表角频率,单位rad/s;t代表时间,单位s。
我们把\(\Delta\theta=\theta\left(t_1\right)-\theta\left(t_2\right)=\omega\left(t_1-t_2\right)\)称为相位延迟(相移,phase
shift),用\(\varphi\left(\omega\right)\)、∠Hjω表示,单位是rad;将\(-\frac{\varphi\left(\omega\right)}{\omega}\)、\(-\frac{\angle
H\left(j\omega\right)}{\omega}\)称为相位延时(相时延,phase
delay),用\(P\left(\omega\right)\)表示,单位是s。
既然相时延的公式中又有相位,又有频率,又涉及到斜率,可以使用bode图来清晰查看相时延,因为系统相频响应的bode图横坐标就是\(\omega\),纵坐标就是\(\angle
H\left(j\omega\right)\)。考虑以下两种系统的相频响应bode图:
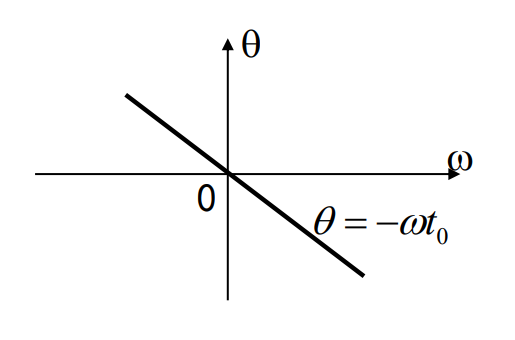
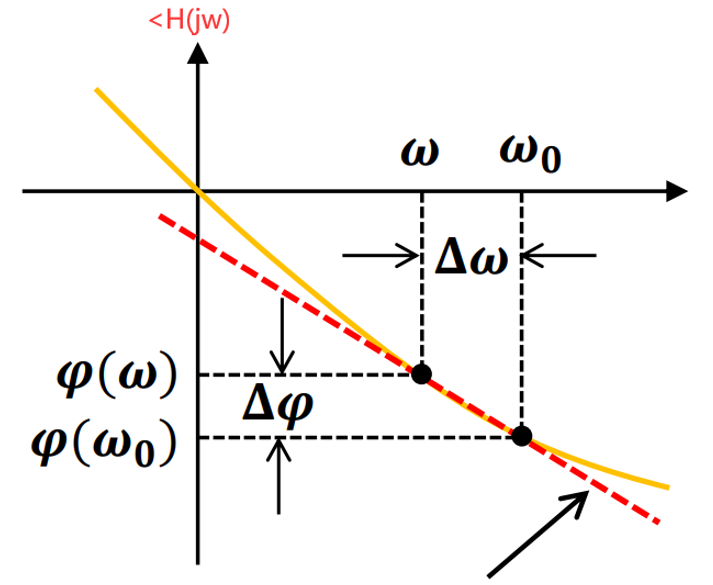
可以看出,对于图1所示线性相位系统,还好说,其相频响应bode图斜率的相反数就是相时延,一旦迁移到非线性相位系统,相时延\(P\left(\omega\right)=-\frac{\angle
H\left(j\omega\right)}{\omega}\)似乎就没什么实际意义了,可是转念一想:诶呀,群时延是线性相位系统bode图的斜率,那我只要再弄一个非线性系统bode图的斜率不就好了?图像斜率用什么表示?不就是微分嘛。于是乎,群时延的概念应运而生,定义群时延:
\[
\tau(\omega) = -\frac{d\angle H(j\omega)}{d\omega}
\]
表示信号经过系统后,对于信号处于不同频率成分\(\mathbf{\omega}\)的分量,它们各自的相位所经历的时间上的延时。
从上述定义我们可以看出,相时延就是群时延在线性相位系统下的特殊情况,也就是相频响应bode图斜率为定值,此时\(-\frac{d\angle
H\left(j\omega\right)}{d\omega}=-\frac{\angle
H\left(j\omega\right)}{\omega}\)。写到这里,不由得想起来初中对速率的定义是\(v=\frac{s}{t}\),而上了高中,学了微积分之后,速率的定义式就变成:\(v=\frac{ds}{dt}\),原来是因为初中研究的都是恒速率简单运动,而高中研究的就是稍复杂些的变速率运动,于是乎,前者对速率的定义不再适用(或者说变成了平均速率),后者对速率的定义更为精确(也就是瞬时速率)。所以说,相时延与群时延的区别就好比平均速率与瞬时速率之间的区别,这么一说是不是好懂了许多?
缘由:为什么需要群时延
有了上面对群时延的定义,我们不经联想到:啥啊这是?一上来就噼里啪啦一堆定义,干啥玩意啊,有啥用啊?那当然是研究一个信号经过系统后的失真情况。
我们考虑一个方波,如果是一个连续时间周期信号,那么它是由无数个复指数信号(正弦波)叠加而成(连续时间周期信号的傅里叶级数是一般一个周期序列,这里不详细展开,详见《信号与系统》)。那么这些复指数信号在通过一个系统后,要想输出还是一个方波,即形状不发生改变,就要求它们在时域上的相对位置不能变化,也就是所有频率的波的延迟时间一致。等会,“所有频率的波的延迟时间”,不就是群时延的定义吗?
音乐厅中,我们希望不同频率声音到达听众耳朵的时间延迟是相等的,以减小声音的失真此时就要求线性相位系统;雷达系统中,回波信号的处理若不满足线性相位,则会给举例计算带来误差。
如果系统对所有的频率分量都有相同的相位延时(线性相位系统,此时群时延等于相时延,相频响应曲线为一条直线),那么信号经过该系统后,波形不发生失真,只是有一定的延时。但如果不同频率分量有不同的相位延时(非线性相位系统),那么信号经过该系统后将产生失真。当然这里所说的失真是指相位失真,如果信号还想要不发生幅度失真,那么它的幅频响应也得是一条水平直线才行。
注:
数字角频率\(\omega\)等于模拟角频率\(\Omega\)对采样频率\(f_s\)归一化,即:1 \(\omega=\frac{\Omega}{f_s}=\Omega
T_s\),单位rad;其中\(T_s\)为采样周期,单位s;\(\Omega=2\pi f\),单位rad/s;